






下载

设计说明
详细安装请前往:http://www.thingiverse.com/thing:17773
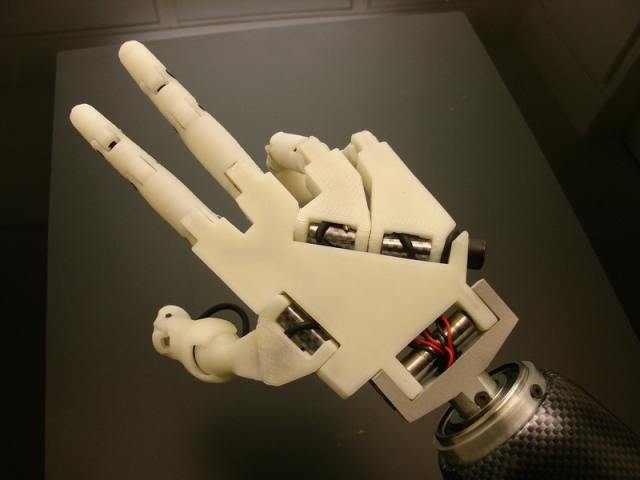
This is a work in progress, files might change until it is finished.
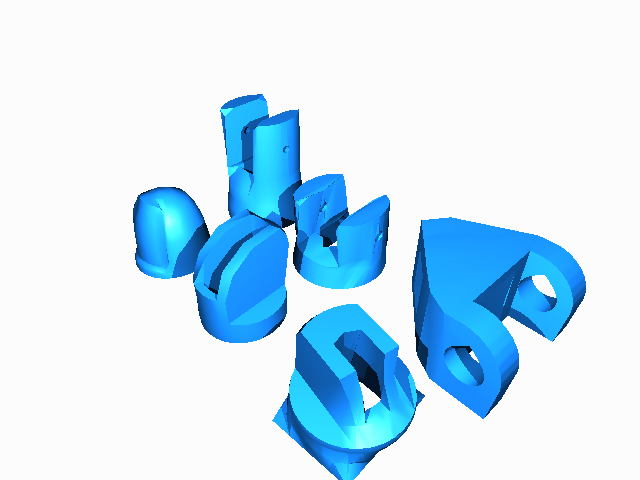
Print one of each STL files attached. I did it in ABS.
Print wriarge, wristsmallV2,thumb3 with an infill of 30%, 3 shells, best with no support, no raft.
Print auriculaire2,index2,majeure2,ringfinger2 with an infill of 30%, 1 shell, best with no support, no raft.
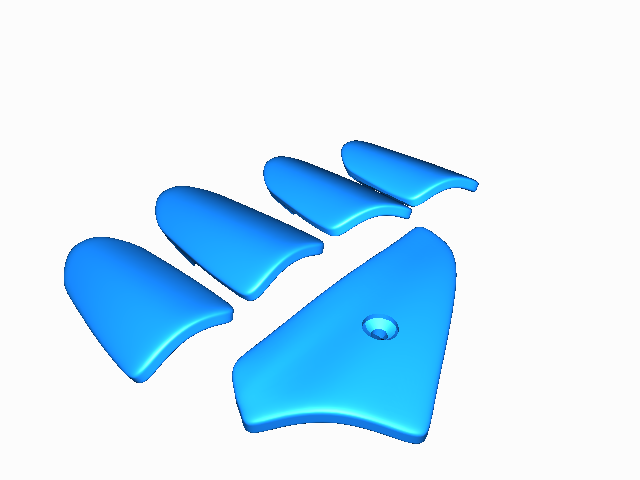
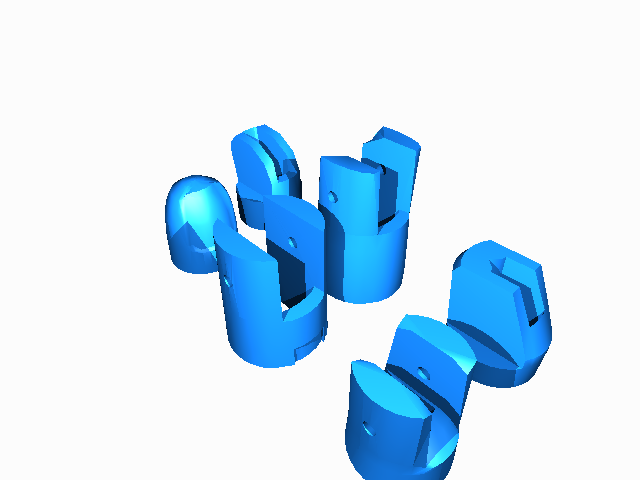
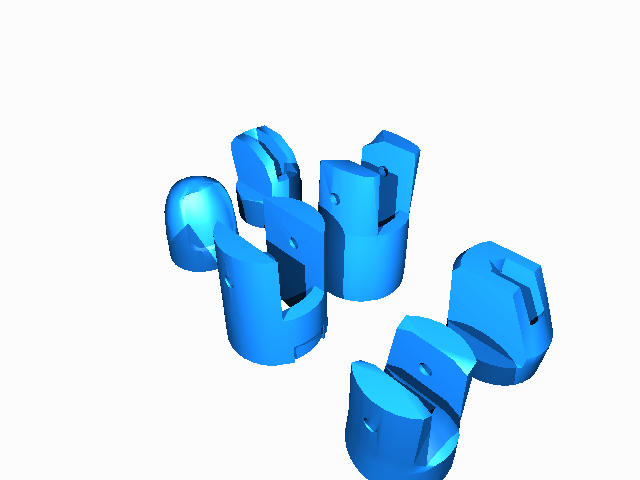
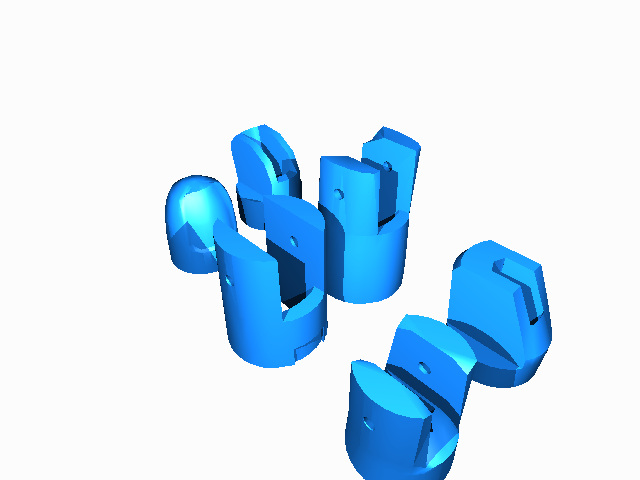
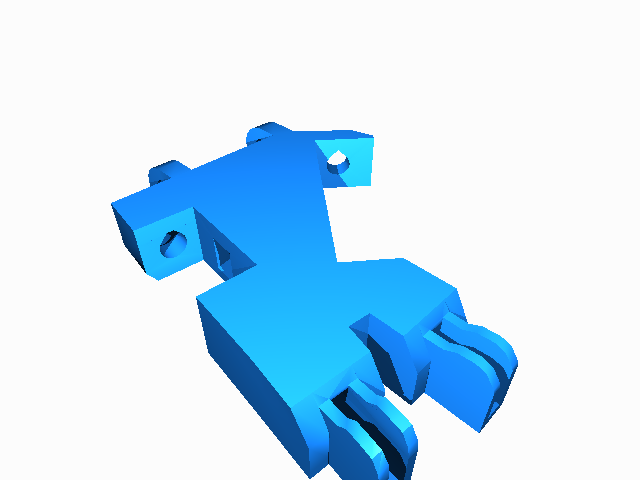
Print robpart2V2, robpart3, robpart4V2, robpart5V2 with an infill of 30%, 3 shell, best with raft.
Print coverfinger with an infill of 30%, 3 shells, with support.
Big bolts are now printable. (Not really strong but enough for tests.)
You can also use 3mm filament instead of the 16x3mmx2cm.
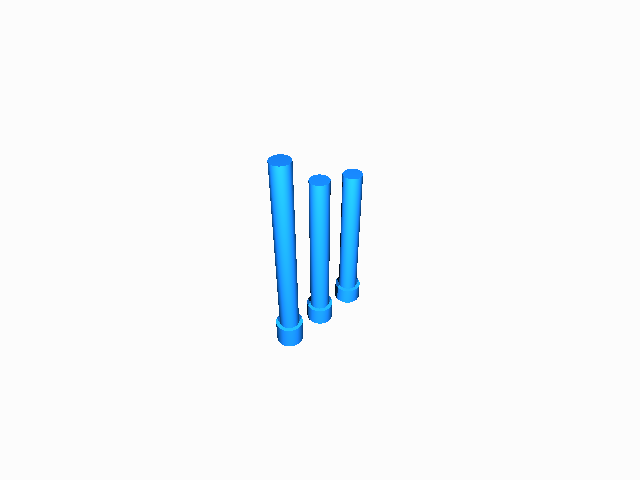
1x8mmx8cm bolt is required for to attach wriarge to wristsmall.
1x8mmx4cm bolt is required for to attach wriarge to thumbbottom.
1x8mmx6cm bolt is required for to attach wriarge to robpart1.
16x3mmx2cm bolts are required for all fingers hinges(I have recut each bolt to adapt to finger width)
Glue with acetone like on pictures:
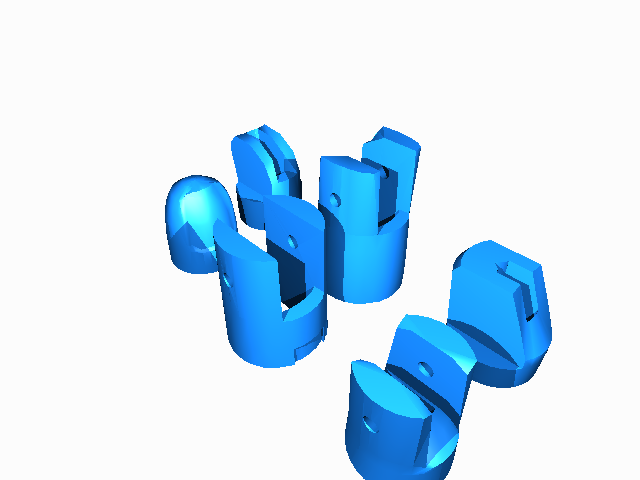
Thumb3 flat parts together but Not the tip.
Finger flat parts but Not the tips(Be carefull not to mix them up, they all have a different size)
Redrill 8mm holes if needed.
Drill all finger hinges with 2.5mm drill. (Be careful not to break parts)
You will need to round up with a knife or a file the insides of the hinges in order to fold correctly the fingers.
23/02/12 files shouldn't change anymore unless someone finds a major problem.
26/02/12 Okay, I have added parts of the forarm, print without support but with raft. I have already set in some extra parts intended to support overhangs in robpart2V2, robpart3, robpart4V2, robpart5V2
Once printed remove the added supports and the anti-warp structures.
Make sure to remove only the added parts and not the servo brackets.
Redrill the brackets if necessary.
Glue with acetone robpart1, robpart2v2 and robpart5V2. Make sure the servo brakets are aligned.
Glue together robpart3 and robpart4V2.
Make sure the servo brakets are aligned.
Fit and bolt in the 4 servos and the Arduino board.
Wire the servos to the board.
Run from each servos two rods of nylon (0.8mm is best) to the tip of each finger. Make sure not to twist them on the way through. When passing the bolts of hinges, one rod has to be over and one has to be under. Add on each bolt a ring2 in the hinge. Set your servo in to max position suposedly with straight flat fingers with the horn set to full pull out. Secure the rods at the tip of fingers by making two knots + a drop of cyanocrylate glue. Rods have to be tight fit between the horn and tip of finger.
Once all fingers are wired through, glue the tips of fingers with acetone.
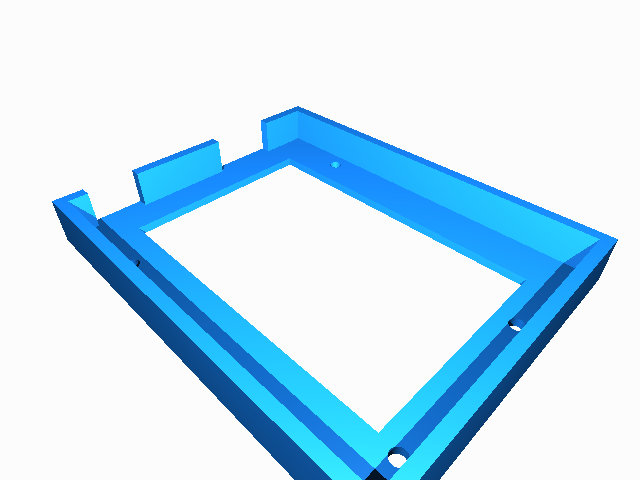
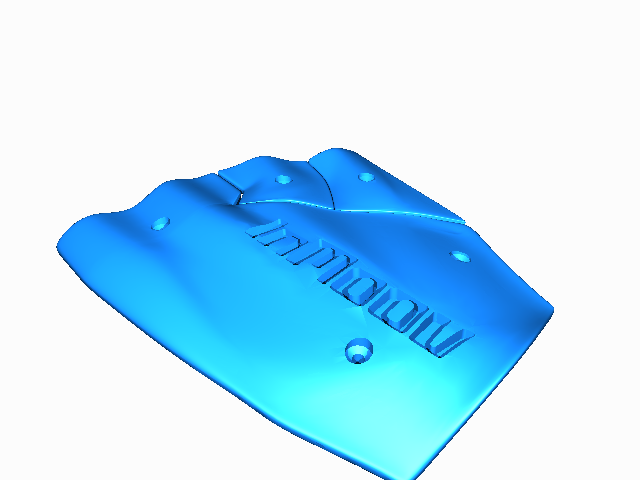
Mount the "topsurface" on the back of the hand with 3mmx2cm bolts.
Glue the coverfinger on top of fingers. Make sure movement is free with hinges.
Update 03/03/12: Thumb3 has been checked so that all six parts sit correctly on bed.
Update 15/03/12: Big Cover for the right hand ready and uploaded, servos and Arduino arrived and almost installed. Added little cable holders to glue, and an Arduino support (thanks to Jestin and pchretien)
Update 21/03/12 I redesigned robpart2 to robpart2V2 due to missing piece of bracket( Thanks Wulfnor)
Update 22/03/12 with little rings to put inside each hinges to ease the bending of fingers. They have to be set on each bolt.I'm not totally ready with diameters yet but I upload the file now, so you can have them, you will need to redrill them and recut them to fit them in.
Update 28/03/12 you can download the scripts for Arduino to either do the pattern motion shown in the last video or use your keyboard to control the servos.(you need to install serialterm for keyboard control)Thanks to Crazy Jaw for the help.
Update 01/04/12 of Wristsmall1 to WristsmallV2 avoids the motion from closing too much the hand. Also added holes for positio
