



下载


设计说明
我使用的材料:
• Arduino uno
• Tower Pro 9g servos
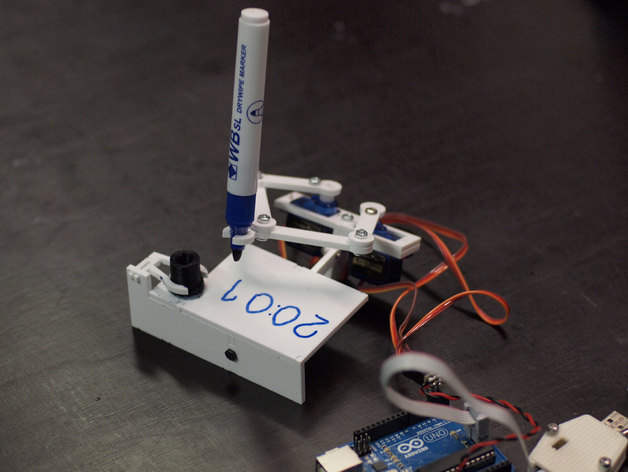
• 白板记号笔,尖头的
• 一个小型自定义伺服适配器,还有servo-arduinos。你也可以使用跳线:5V连接红色伺服线,GND连接棕色或黑色的伺服线,伺服引脚连接黄色或橙色伺服线。
(以下步骤适用于version 1.01!)
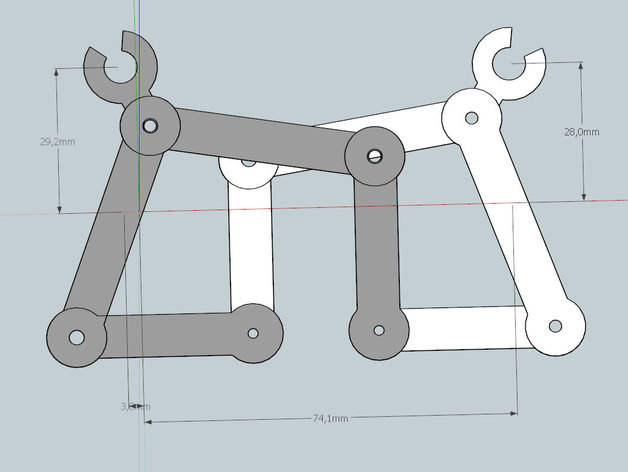
1. 3D打印plotclock_SUP7.skp
o pdf文档中servo臂的黑色区域需要镂去,以便安装和旋转。
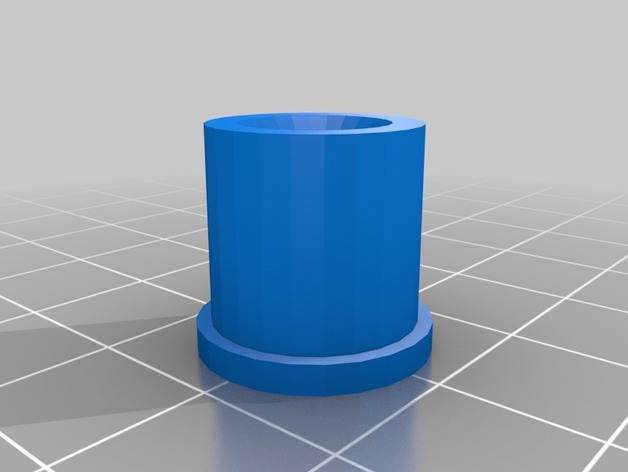
2. 3D打印swee.stl或重用其他圆柱体零件,用于清洁白板。
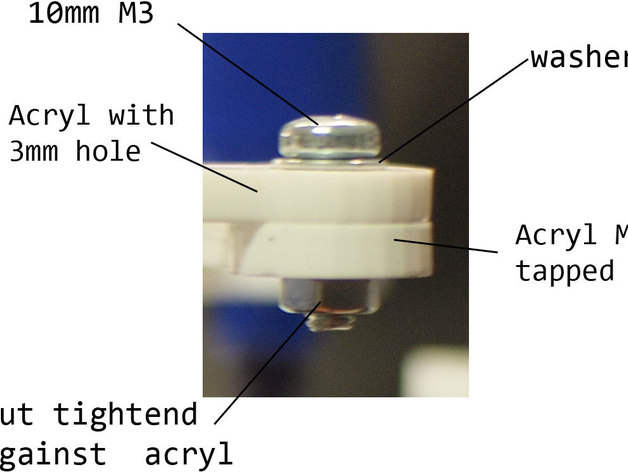
3. 使用M3螺纹钻出2.5mm的孔。
4. 使用M3螺丝安装书写臂,轻轻地调整埋头螺母,使螺丝头下方的连接处能灵活运动。
5. 向Arduino载入plotclock_V1,详见代码注释
o 需要time库http://playground.arduino.cc/Code/time
6. 用双面胶粘帖布,用作清洁布。
7. 根据Arduino草图,将伺服装置安装在数字引脚2、3和4处。接通Arduino后,不安装任何东西,进行测试。(连接引脚1、2和3不是最佳方案,因为引脚1也是TX引脚,在Arduino启动时升降伺服会发生跳动)
8. 安装
o 您可能需要再钻几个孔用于固定伺服。
如果固定孔太小,亚克力很脆,容易断裂。只需将伺服臂推到连接处,不要用螺丝固定!初始校准阶段,不安装休息剪辑雨刮器(会与钢笔发生碰撞)。用胶水或螺丝将伺服臂与亚克力零件相连。
9. 安装伺服臂时,手动调试确保其能在白板上任何位置进行书写。
10. 为arduino接通电源,它会自动开始校准,二个伺服每一秒都会旋转90度。
11. 修改SERVOFAKTOR, SERVOLEFTNULL和SERVORIGHTNULL的值,直到各个环节相互协调(详见代码)。
12.测试完毕后,安装笔和清洁固件。
